Многие существующие робототехнические системы черпают вдохновение в природе, искусственно воспроизводя биологические процессы, естественные структуры или поведение животных для достижения конкретных целей. Это связано с тем, что животные и растения от природы наделены способностями, которые помогают им выживать в соответствующей среде обитания и, таким образом, могут также улучшить производительность роботов за пределами лабораторных условий.
Исследователи из лаборатории робототехники, вдохновленной мозгом (BRAIR), Института биороботики Школы перспективных исследований Сант’Анна в Италии и Национального университета Сингапура недавно разработали контроллер, основанный на растениях, который может улучшить производительность роботизированных манипуляторов в неструктурированных реальных условиях. Этот контроллер, представленный в статье, представленной на конференции IEEE RoboSoft 2023 в Сингапуре, и выбранный среди финалистов премии за лучшую студенческую работу, в частности, позволяет роботам-манипуляторам выполнять задачи, связанные с достижением определенных местоположений или объектов в их окружении. Эта статья была частью более широкого исследовательского проекта под названием GrowBot.
«Мягкие роботизированные руки — это новое поколение роботизированных манипуляторов, которые черпают вдохновение из передовых возможностей манипулирования, демонстрируемых «бескостными» организмами, такими как щупальца осьминога, хоботы слонов, растения и т.д.», — сказал Tech Xplore Энрико Донато, один из исследователей, проводивших исследование. «Воплощение этих принципов в инженерные решения приводит к созданию систем, состоящих из гибких легких материалов, которые могут подвергаться плавной упругой деформации для обеспечения податливого и ловкого движения. Благодаря этим желательным характеристикам эти системы плотно прилегают к поверхностям и демонстрируют физическую надежность и безопасную для человека эксплуатацию при потенциально низких затратах.»
В то время как мягкие манипуляторы робота могут быть применены для решения широкого спектра реальных задач, они могут быть особенно полезны для автоматизации задач, связанных с достижением желаемых местоположений, которые могут быть недоступны жестким роботам. Многие исследовательские группы в последнее время пытаются разработать контроллеры, которые позволили бы этим гибким рычагам эффективно решать эти задачи.
«Как правило, функционирование таких контроллеров зависит от вычислительных формул, которые могут создать корректное отображение между двумя рабочими пространствами робота, то есть пространством задач и пространством привода», — пояснил Донато. «Однако надлежащее функционирование этих контроллеров, как правило, зависит от обратной связи со зрением, что ограничивает их применимость в лабораторных условиях, ограничивая возможность развертывания этих систем в естественных и динамичных средах. Эта статья является первой попыткой преодолеть это неразрешенное ограничение и распространить охват этих систем на неструктурированные среды.»
Поскольку было установлено, что большинство существующих контроллеров для мягких манипуляторов роботов в основном хорошо работают в лабораторных условиях, Донато и его коллеги задались целью создать контроллер нового типа, который также мог бы быть применим в реальных условиях. Предложенный ими контроллер вдохновлен движениями и поведением растений.
«Вопреки распространенному заблуждению о том, что растения не двигаются, растения активно и целенаправленно перемещаются из одной точки в другую, используя стратегии перемещения, основанные на росте», — сказал Донато. «Эти стратегии настолько эффективны, что растения могут колонизировать почти все места обитания на планете, чего не хватает животному царству. Интересно, что, в отличие от животных, стратегии передвижения растений не проистекают из центральной нервной системы, а скорее возникают из-за сложных форм децентрализованных вычислительных механизмов.»
Стратегия управления, лежащая в основе функционирования контроллера исследователей, пытается воспроизвести сложные децентрализованные механизмы, лежащие в основе движений растений. Команда специально использовала инструменты искусственного интеллекта, основанные на поведении, которые состоят из децентрализованных вычислительных агентов, объединенных в восходящую структуру.
«Новизна нашего контроллера, вдохновленного биотехнологиями, заключается в его простоте, в котором мы используем фундаментальные механические функции мягкой руки робота для создания общего режима достижения цели», — сказал Донато. «В частности, мягкая рука робота состоит из резервированного набора мягких модулей, каждый из которых приводится в действие с помощью триады радиально расположенных приводов. Хорошо известно, что для такой конфигурации система может генерировать шесть основных направлений изгиба.»
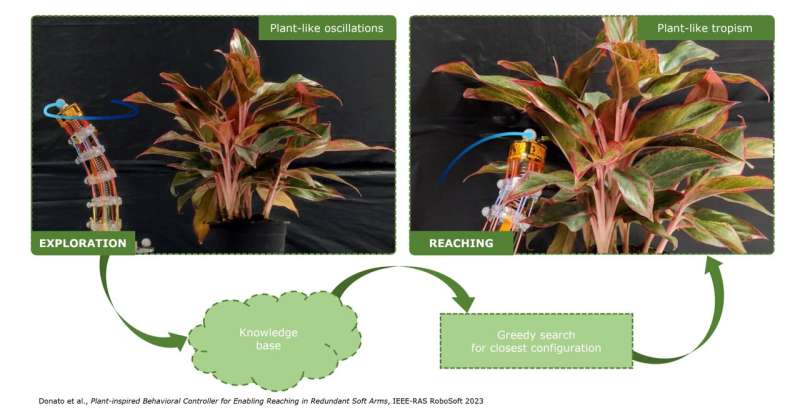
Вычислительные агенты, лежащие в основе функционирования контроллера команды, используют амплитуду и время настройки привода для воспроизведения двух различных типов движений растений, известных как круговое движение и фототропизм. Круговые движения — это колебания, обычно наблюдаемые у растений, в то время как фототропизм — это направленные движения, которые приближают ветви или листья растения к свету.
Контроллер, созданный Донато и его коллегами, может переключаться между этими двумя режимами работы, обеспечивая последовательное управление роботизированными манипуляторами в два этапа. Первая из этих стадий — фаза исследования, когда руки исследуют свое окружение, в то время как вторая — фаза достижения, когда они перемещаются, чтобы достичь желаемого места или объекта.
«Возможно, самым важным результатом этой конкретной работы является то, что это первый случай, когда резервные мягкие манипуляторы робота получили возможность использовать возможности за пределами лабораторной среды с очень простой системой управления», — сказал Донато. «Кроме того, контроллер применим к любой мягкой роботизированной руке при условии аналогичного устройства приведения в действие. Это шаг на пути к использованию встроенных датчиков и стратегий распределенного управления в континуумных и мягких роботах».
На данный момент исследователи протестировали свой контроллер в серии тестов, используя модульную, легкую и мягкую роботизированную руку с кабельным приводом и 9 степенями свободы (9-DoF). Их результаты были весьма многообещающими, поскольку контроллер позволял arm как исследовать окружающую среду, так и достигать целевого местоположения более эффективно, чем другие стратегии управления, предложенные в прошлом.
В будущем новый контроллер можно будет применить к другим мягким роботизированным манипуляторам и протестировать как в лабораторных, так и в реальных условиях, чтобы дополнительно оценить его способность справляться с динамическими изменениями окружающей среды. Тем временем Донато и его коллеги планируют продолжить разработку своей стратегии управления, чтобы она могла генерировать дополнительные движения роботизированной руки и поведение.
«В настоящее время мы стремимся расширить возможности контроллера, чтобы обеспечить более сложное поведение, такое как отслеживание цели, сгибание всей руки и т.д., чтобы такие системы могли функционировать в естественных условиях в течение длительных периодов времени», — добавил Донато.